Dopo aver completato il circuito di amplificazione visto in questo post ed in questo post e' arrivato il momento di portarlo in laboratorio per la calibrazione e per verificare che la risposta del sensore alle sollecitazioni fosse corretta
La prova e' stata del tutto insoddisfacente ed il sistema di lettura ha mostrato molti difetti.
E' stato quindi necessario rimettere tutto a posto e verificare dove fosse l'errore.
Per semplicita', prima di prendere in mano il saldatore ho voluto effettuare una simulazione con LTSpice, un software open per la modellizzazione di circuiti elettrici
Il primo passo e' stato cercare il modello di LM358 (il vero modello e non l'operazionale teorico) che si puo' scaricare presso questo link (LTSPiceOpAmp3.zip)
Si copia i file nelle rispettivi directory di LTSpice (vedi pdf allegato nello zip)
Si seleziona quindi il componente Opamps, opamp3
Dopo aver posizionato il componente sullo schema si fa clic destro sul triangolo e si aprono le proprieta'
Doppio Clic su UA741 e si seleziona LM358
Costruito il circuito con le resistenze previste ed e' stata lanciata una simulazione con una tensione variabile da -0.7mV a 0.8mV (il range tipico della cella di carico)
Dal grafico sopra riportato (linea in blu) si vede chiaramente che la risposta del sensore e' del tutto non lineare. Anche dal punto di vista della simulazione il circuito con LM358 non e' adatto allo scopo previsto
Dove sono i limiti del circuito e dell'LM358 per l'uso previsto
Provando una simulazione con un segnale sinusoidale da 200 mV si ha qualche idea in piu'
1) l'integrato funziona in amplificazione soltanto per tensioni negative (studiando un po' di piu' gli operazionali avrei dovuto capirlo da solo ed e' questo il motivo per cui LM741 ha una alimentazione VCC+/VCC- e non VCC+/GND)
2) Forse la corrente da amplificare e' troppo bassa (anche con tensioni con tensioni sempre negative non si ha linearita'
in conclusione il futuro vedra' un paio di test passando da un amplificatore operazionale a quelli che si chiamano "instrumentation amplifier" con l'uso di un INA126p ed un AD623
Questo progettino e' vecchio di 4 anni ed e' relativo ad una attivita' durante il dottorato di ricerca. Lo pubblico adesso perche' ho ritrovato le immagini originali
Si tratta di un semplice misuratore di intensita' di luce mediante un fotodiodo TEMT6000. Il collegamento e' semplicemente a tre cavi (alimentazione + 1 collegamento dati verso la porta A0 dell'Arduino)
Attenzione : il componente deve saldato con attenzione. Come da scheda tecnica non puo' essere superata la temperatura di 200°C per piu' di 3 secondi
Come si puo' vedere e' stata utilizzata una Arduino Bluetooth perche' il sensore doveva essere privo di cavo di collegamento che interferissero durante la misura
---------------------------------------------------- int val;
void setup() { Serial.begin(115200); }
void loop() { val = analogRead(0); Serial.println(val, DEC); delay(1000); }
Era da un po' di tempo che aspettavo la possibilita' di aggiornare Android nel mio Galaxy Next Turbo.
A differenza del suo fratello minore Galaxy Next, per lungo tempo non e' stato possibile fare una custom rom non derivante da quella stock a causa dei driver proprietari di alcuni componenti del telefono
Oggi ho trovato (forse con un po' di ritardo) la JellyPlus v.3 , una Rom che permette di installare Android 4.2.2 al posto dell'originale Gingerbread.
La procedure e' piuttosto semplice e lineare.
1) scaricare i file pop_plus_CWM, JellyPlus3_turbo e Gapps_for_Jellyplus_3
2) spengere il telefono ed avviarlo mediante la combinazione On, Vol + e Home
3) selezionare Apply Update/CWM
4) Wipe data/cache
5) Install zip from sd e selezionare JellyPlus3
6) Reboot
in seguito, dall'interno della CWM si puo' effettuare update per installare anche le applicazione Google
L'installazione e' molto lenta ...pazientare
Al termine si puo' vedere il nuovo Android
Le prime impressioni d'uso sono buone ed il sistema funziona meglio che con la stock.
Questo e' uno dei motivi per cui sarebbe bene ritornare al Nokia 3310
Oggi stavo facendo una scansione del telefono con inserita una vecchia SD card in cui erano presenti degli apk di backup sono stati individuati come Malware/Virus
Penetho.A Rootcage.B
se l'origine del secondo e' piuttosto spiegabile (praticamente tutti i telefoni che ho sono stati o sono con permessi di root) il secondo e' decisamente piu' preoccupante perche' e' recente (e' stato isolato nel giugno 2013 e non puo' essere una eredita' del mio vecchio Huawei)
Da una ricerca su Internet, Penetho.A e' classificato solo come indesiderabile (nessun furto di informazioni, tracciamento della posizione, spedizione SMS od altri fastidi simili) ma il rischio di incappare in qualcosa di piu' malevolo e' sicuramente presente
C'e' da dire che gli antivirus mobile sono piuttosto permalosi. Sul Nexus S sono state segnalate come criticita' il fatto di avere attivato il Debug Mode, la possibilita' di installare applicazioni da Origini sconosciute e la presenza del root....dato che ogni tanto lo uso per sviluppare non mi sembra che questi siano motivi di allarme
Un amico e' tornato dalla Thailandia con un telefono clone del Samsung S3 pagato circa 70 euro
Quando per mail mi ha parlato del clone pensavo che fosse un telefono con caratteristiche simili ma quando ho avuto modo di vederlo direttamente la parola clone assume un altro significato...il telefono riporta i loghi Samsung su molta componentistica (batteria interna compresa) ed anche nelle stringhe interne ad Android ma ovviamente non e' l'originale. Sono presenti le App ufficiali di Samsung compreso Kies
Notare che l'immagine di Home e' la stessa del vero S4
Il logo Samsung ha iniziato a deteriorarsi
A cover rimossa
Da una breve indagine risulta che:
CPU : DualCore ARMv7 (VFPv3 NEON) Dual Core 1.9 GHz (originale Quad Core)
GPU : PowerVR SGX 531
Risoluzione : 480x800 (originale 1920x1080 Full HD)
Camera principale : 12.8 MPixels
Camera frontale : 1,9 MPixels
Memoria : 503 Mb
RAM : 1800 Mb
Internal SD : 2 Gb (originale minimo 16 Gb)
Sensori di direzione,prossimita',luce, bussola e distanza (l'originale ne ha molti di piu')
Il punteggio del benchmark di AnTuTu e' di 8004.
Per confronto il vero Samsung S4 ha un punteggio di 27435, il mio vetusto Nexus S si attesta a 4944 mentre il mio Nexus 7 2012 a circa 12000.
Una scansione con AVG rileva un malware nell'applicazione (non disinstallabile) UCWeb che non compare nell'elenco delle applicazioni. UCWeb e' un browser molto diffuso in estremo oriente ma e' strano che non compaia nella lista delle app...forse una applicazione malevola che si identifica con un nome conosciuto per nascondersi
In buona sostanza il telefono e' stato pagato per quello che vale (leggendo su Internet viene assimilato ad un Samsung Galaxy S4 Mini ma credo che il paragone sia esagerato)
piccola nota finale: probabilmente il suo codice reale e' MTK6577
E' un po' di tempo che attendo sul mio Nexus 7 2012 attendo l'aggiornamento di Android KitKat e non vedevo arrivare niente
Un po' infastidito sono andato sul PlayStore per vedere se c'era qualche notifica (in realta' dovrebbe comparire nella barra delle notifiche) e con sorpresa c'era un persistente errore di "Connessione Scaduta"
Visto che l'ultima modifica che avevo apportato nell'arco di un mese era quella di installare SkyGo (un amico mi aveva chiesto di provarla sul Nexus7) ho disinstallato l'applicazione, riavviato e come per magia e' ripartito il Play Store.
Grazie ad un micrometro e' stato potuto calibrare con precisione il sensore di allungamentopresentato in questo post
Nella tabella sono riportate a sinistra i valori letti sul micrometro ed a destra il corrispondente valore letto direttamente sull'Arduino (i valori a sinistra sono in mm, a destra la lettura del canale analogico dell'Arduino)
Si deve precisare che i valori di lettura analogici sull'Arduino non erano molto stabili e quindi il dato e' stato letto come media di 5 misure consecutive
Riportando in grafico in grafico si evidenzia come la retta di taratura sia ottima come coefficiente di correlazione. Dai dati si potrebbe pensare di poter spingere la precisione fino a 5 centesimi di millimetro ma a causa della fluttazione del dato letto dall'Arduino e' piu' ragionevole impostare la sensibilita' della misura a circa il decimo di millimetro
Il progetto Force Guage sta arrivando al suo termine
L'hardware finale e' stato montato nella sua versione finale
-Arduino Due
-Ethernet Shield
-Amplifier Shield (autoprodotto)
adesso si passa al codice
per Arduino e' stato riutilizzato quasi tutto il codice di questo post
C'e' da annotare che (evindenziato in giallo)
1) per usare il comando itoa in Arduino Due si deve aggiungere #include "itoa.h"
2) per far funzionare il convertitore analogico digitale di Arduino due a 12 bit lo si deve richiedere esplicitamente con il comando analogReadResolution
Codice Arduino
------------------------------------------ #include <SPI.h> // needed for Arduino versions later than 0018 #include <Ethernet.h> #include "itoa.h" byte ardmac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; IPAddress ardip(192, 168, 0, 2); byte Server[] = { 192,168,0,1 }; unsigned int porta = 7755; unsigned int localPort = 8888; // local port to listen on int sensorPin = A3; int sensorValue = 0; EthernetUDP Udp; char buf[12]; // "-2147483648\0" void setup() { Ethernet.begin(ardmac,ardip); Udp.begin(localPort); analogReadResolution(12); } void loop() { sensorValue = analogRead(sensorPin); Udp.beginPacket(Server, porta); Udp.write(itoa(sensorValue, buf, 10)); Udp.endPacket(); delay(100); }
----------------------------------------
per il frontend di rappresentazione realtime dei dati e' stato scritto un programmino in Qt che implementa un server UDP e mostra i dati mediante la libreria QCustomplot
Codice Qt (4.8.5)
file .pro (le modifiche sono in giallo)
------------------------------------------
QT += core gui network
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
TARGET = geolab
TEMPLATE = app
SOURCES += main.cpp\
mainwindow.cpp \
qcustomplot.cpp
HEADERS += mainwindow.h \
qcustomplot.h
FORMS += mainwindow.ui
------------------------------------------
in azzurro le righe di codice relative al server UDP mentre in giallo quelle relative alla visualizzazione del grafico
Alla ricerca di un software non coperto da licenza per il telerilevamento di dati Landsat ho provato Beam, un software sponsorizzato da ESA
Il programma e' scritto in Java ed eredita da questa scelta una sostanziale lentezza di calcolo e di gestione dei dati in memoria
Fra i pregi, oltre ad essere gratuito, vi e' la possibilita' di aprire una grande quantita' di formati compreso il recente Landsat 8 (sono esclusi i satelliti iperspettrali) ed una serie di algoritmi avanzati (solo per Meris)
Per poterlo utilizzare al momento attuale per i dati Landsat si deve effettuare un aggiornamento mediante Module Manager (Module Updates) del modulo Landsat perche' in agosto 2013 la Nasa, come spesso accade, ha modificato gli header delle immagini
Interessante da aggiungere a posteriori e' il modulo Envi Reader per le immagini salvate in .hdr
Puo' sembrare strano ma c'e' ancora qualcuno che oggi i registratori ad audiocassette e me li porta a riparare dato che non sono piu' acquistabili
Di solito i registratori sono oggetti piuttosto solidi e basta un minimo di assistenza per farli ripartire.
Il modello sotto riportato ha una ventina di anni ed all'accensione si udiva il motore sotto sforzo ma nessun movimento
E' stato sufficiente aprirlo, sostituire le due cinghie di trasmissione oramai non piu' in tensione con due elastici (frecce in rosso) e lubrificare il meccanismo sottostante il volano (il cerchio tra le due frecce) per fare ripartire il registratore
In altri modelli, piu' vecchi, dove il problema e' di tipo elettrico spesso si risolve sostituendo il fusibile nascosto all'interno della scocca
Come ex amministratore di rete presso l'universita' e come ex white hat conosco un po' di trucchetti per attaccare una rete WiFi
Con l'arrivo del protezione WPA pero' pensavo che non fosse possibile entrare in una rete Wireless a meno di un colpo di fortuna (l'attacco WPA si basa sulla forza bruta) o stupidita' nella configurazione dell'access point (mi e' capitato di vedere degli access point con la password wpa che coincideva con l'SSID)
Frugando su Internet mi sono imbattuto in Reaver, un software che sfrutta una vulnerabilita' sull'autenticazione automatica WPS, ed ho voluto provare sulla mia attrezzatura
Ho a disposizione un solo router wireless con capacita' Wps ed e' un access point portatile PN51T.
Per usare Reaver e' inoltre necessario avere a disposizione una scheda di rete che possa entrare in Monitor Mode..con mia grande sorpresa una scheda wifi Alfa AWUS036Hsu porta USB e dotata di chipset Realtek 8087 supporta questa modalita' in modo eccellente aggiungendo anche una antenna ad alto guadagno
Per usare Reaver conviene usare la distribuzione Back Track in modo da avere gia' tutto configurato
L'attacco e' piuttosto semplice perche si deve mandare prima la scheda in Monitor Mode
airmon-ng start wlan1
dopo si individuano gli access point visibili con capacita' wps mediante wash
wash -i mon0
guardando alla colonna WPS Locked si puo' vedere come alcuni access point siano protetti da questo tipo di attacco (Yes)
Selezionato l'obbiettivo di iniziare l'attacco (che rientra nella categoria di forza bruta perche' prova tutte le combinazioni di wps pin code)
reaver -b mac_access_point -i mon0 -v
con un po' di disappunto la chiave wpa del mio access point e' stata trovata in meno di 30 secondi.
Il motivo della rapidita' e' che l'access point e' configurato con il pin code di default (12345670) che e' il primo che reaver prova
Un paio di controindicazioni:
1) l'attacco e' molto rumoroso perche' genera traffico per tutto il tempo in cui vengono provati i pin code (possono occorrere anche ore) e quindi e' facile da identificare. Alcuni access point prevedono un numero limitato di tentativi nell'unita' di tempo od addirittura disabilitano il wps dopo un certo numero di tentativi falliti
2) l'access point bersaglio deve essere piuttosto vicino all'attaccante perche' il traffico e' basato su una sequenza precisa di pacchetti che non devono essere persi (nel mio caso questo era sicuramente soddisfatto perche' trra l'antenna e l'access point c'erano circa 20 cm)
PS: ovviamente questi esperimenti si fanno sulle reti che si amministrano....no su quelle dei vicini anche perche' e' reato
aggiornamento 20 maggio 2016
---------------------------------------
se si collega la camera con il cavo 192.168.1.111
per resettare il firmware si seguono le istruzioni a questa pagina
le istruzioni sul movimento della ptz del codice Python non sono esattamente corrette. Debuggando
la pagina web dell'amministrazione della camera le istruzioni corrette sono
in pratica si fa movimento in una direzione, si attende e poi si stoppa, altrimenti il movimento va a fine corsa
---------------------------------------
Per cercare un sostituto a basso costo della IP Camera Samsung PTZ vista in questo post mi sono per una trentina di euro questa Ip Camera non marcata su un e-commerce cinese
La cosa divertente dell'acquistare prodotti cinesi e' che arrivano totalmente privi di istruzioni e sostanzialmente privi di marca per cui la prima sfida e' stata quella di capire cosa avevo davanti. Il cd incluso con i driver recava un directory denominata asw-380 ed un manuale in inglese ma senza indicazioni di marca e modello.
Guardando in una immagine relativa all'uso del software Android IP Cam Viewer viene riportato che deve essere selezionata l'opzione MayGion IP Camera V3 e questa e' stata l'indicazione fondamentale per individuare il modello.
Per quanto riportato dal manuale la camera e' pilotabile via browser mediante un OCX..quindi non solo sarei stato costretto ad usarlo sotto Windows ma sarei stato costretto ad usare Internet Explorer...la presenza di un programma per Android comunque mi lasciava speranze
La configurazione della rete wireless e' stata semplice perche' sul retro della camera e' disponibile il pulsante WPS per cui il WiFi e' stato autoconfigurato senza l'utilizzo di un computer esterno
Frugando su Internet vi sono frammentarie e scarse informazioni ma sono riuscito a trovare un paio di Pdf in cinese che mostrano la possibilita' di pilotare il dispositivo mediante delle URL (attenzione: esistono due versioni del software della IP Camera MayGion che differiscono sensibilmente, si deve individuare quindi il corretto set di URL)
Per visualizzare lo stream video si puo' utilizzare VLC usando come sorgente del flusso di rete questa URL http://ipcamera:81/videostream.asf?usr=admin&pwd=admin
Per quanto riguarda il movimento PTZ ho scritto invece un semplice programmino in Python che sfrutta un joystick per muovere la camera
---------------------------------------------- import pygame,time try: from urllib.request import urlopen except ImportError: from urllib2 import urlopen pygame.init() j = pygame.joystick.Joystick(0) j.init() conta = 0 tick = 100 try: while True: conta=conta+1 pygame.event.pump() if j.get_button(0) == 1: print "Pulsante 1 : "+str(j.get_button(0)) html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&tick="+str(tick)+"&nPtzTimes="+str(conta)+"&dir=up&user=admin&password=admin") html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&nPtzTimes="+str(conta)+"&dir=none&user=admin&password=admin") if j.get_button(1) == 1: print "Pulsante 2 : "+str(j.get_button(1)) html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&tick="+str(tick)+"&nPtzTimes="+str(conta)+"&dir=right&user=admin&password=admin") html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&nPtzTimes="+str(conta)+"&dir=none&user=admin&password=admin") if j.get_button(2) == 1: print "Pulsante 3 : "+str(j.get_button(2)) html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&tick="+str(tick)+"&nPtzTimes="+str(conta)+"&dir=down&user=admin&password=admin") html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&nPtzTimes="+str(conta)+"&dir=none&user=admin&password=admin") if j.get_button(3) == 1: print "Pulsante 4 : "+str(j.get_button(3)) html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&tick="+str(tick)+"&nPtzTimes="+str(conta)+"&dir=left&user=admin&password=admin") html=urlopen("http://192.168.0.102:81/cmd.xml?cmd=moveptz&nPtzTimes="+str(conta)+"&dir=none&user=admin&password=admin") if j.get_button(4) == 1: print "Pulsante 4 : "+str(j.get_button(4)) tick = tick+25 if tick > 200: tick = 200 if j.get_button(5) == 1: print "Pulsante 5 : "+str(j.get_button(4)) tick = tick-25 if tick < 50: tick = 25 time.sleep(0.1) except KeyboardInterrupt: j.quit()
Cercando di rendere utilizzabile il circuito visto in questo post, ho pensato di rendere la versione definitiva come uno shield Arduino in modo da evitare al massimo cavi volanti
Per fare cio' e' stata presa una normale piastrina millefori tagliata sulle dimensioni di una Arduino a cui sono stati aggiunti pin mediante una strip (i pin inseriti sul lato dei contatti digitali dell'Arduino servono solo a rendere meccanicamente stabile lo shield e non sono elettricamente connessi)
I cavi dalla strumentazione vengono connessi alle morsettiere verdi (il contatto centrale non e' connesso...avevo solo morsettiere a tre posti)
Nelle foto e' mostrato il circuito completo per l'amplificazione da un solo canale dell'LM358 ma sono gia' stati predisposte la morsettiera ed il trimmer per regolare l'amplificazio (a destra nella foto sottostante) per il secondo canale
La lettura dei dati avviene sui Pin A3 (canale 1) e A5 (canale 2) dell'Arduino
Lo shield rovesciato
Alla fine la realizzazione e' piuttosto pulita ed ordinata (almeno per i miei standard)
Foto da www.repubblica.it degradata e ridotta per motivi di copyright
Questo arcobaleno lo ho visto ma non ho avuto il tempo e la posizione per fotografarlo. A parte la particolarita' della posizione dell'arcobaleno c'e' da segnalare che si tratta in realta' di un doppio arcobaleno.
Come si vede dalla foto (ma era piu' evidente dal vivo) all'esterno dell'arco piu' luminoso era presente un secondo arco piu' tenue e dai colori invertiti (si nota come il rosso dell'arco esterno coincida con il rosso di quello interno). Per riferimento l'arco esterno e' in corrispondenza della Cupola del Brunelleschi
Questo computer e' primo portatile personale che mi sono comprato (prima usavo solo quelli di lavoro o materiale obsoleto scartato da altri) ed ha una storia piuttosto complicata perche' e' una macchina che ho quasi subito odiato (costata poco ma con una pessima batteria, un monitor inguardabile alla luce ambientale e plastiche veramente economiche) e lo ho prestato varie volte (anche per prestiti annuali) ed e' sempre ritornato indietro....l'ultima volta giusto ieri
Si tratta di una macchina del 2007 con una scheda grafica SIS, 1024x768, 512 Mb di Ram (in due banchi da 256 Mb un altro motivo per cui ho odiato questa macchina), AMD Sempron 3000+ 1.8GHz
Per rimetterla in vita ho montato una Debian Wheezy XFCE che gira egregiamente (si consideri che nel momento in cui usci' il portatile era in circolazione Debian 4 ..adesso siamo alla 7 e non ci sono problemi)
Per attivare il Wifi si devono aggiungere i repository non-free e poi digitare
apt-get install firmware-b43-installer
Un paio di pecularita' del portatile
1) la scheda WiFi non si attiva di default ma si deve premere il pulsante frontale di destra fino a quando non si accende la luce arancione (vedi foto)
2) Effettuare il boot da USB non e' banale perche' premendo semplicemente F12 al boot non e' mostrata come periferica quella USB anche se inserita. Accendendo con la periferica USB inserita si deve entrare nel Setup del Bios, Boot, Hard Drive,Enter per espandere il ramo, si seleziona la chiavetta (in questo caso una Kingstone DataTraveler) ed con F6 si porta di un passo sopra il disco fisso HTS54xxxxxx. Si esce dal Bios salvando e si riavvia selezionando Hard Disk (in questo caso l'USB viene vista come HD)
Al lavoro ho, come penso piu' o meno tutti, un calcolatore che uso come un utente dai bassi privilegi. Cio' impedisce di giocare sul posto di lavoro ma impedisce anche di installare software per fare elaborazioni che possono essere utili per la mia attivita'
Visto che mi avanza un disco esterno piuttosto capiente ma vecchiotto (120 Gb) e visto che il computer di lavoro e' settato per fare il boot anche da USB Storage ho provato a montare Ubuntu su questa unita', non come Live Cd ma proprio come una vera installazione.
Su Internet ci sono diverse istruzioni che consigliano come prima cosa di rimuovere il disco fisso interno alla macchina con cui si crea l'installazione di Ubuntu sul disco esterno ma sono riuscito a portare a termine l'operazione senza modificare l'hardware della macchina .... basta sapere cosa si sta facendo
Si parte scaricando il file iso di Ubuntu (ho preferito la LTS attualmente al 12.04.03) ed ho creato una pennetta USB con cui fare il boot,
Una volta partito il sistema ho inserito il disco esterno (nella foto sopra si vede male ma e' appoggiato per traverso a sinistra del touchpad con la sigla Kraun) ed ho iniziato l'installazione.
Dopo un primo tentativo andato a vuoto perche' l'installer non voleva inserire GRUB su /dev/sdc (disco esterno) sono ripartito ed invece di creare due partizioni sul disco esterno (/ e swap) ne ho creato tre aggiungendone una di boot (/, /boot e swap).
Al successivo riavvio, selezionando il disco esterno, il sistema Ubuntu e' partito e la velocita' e' sostanzialmente discreta tanto da farne un sistema utilizzabile
Ho comprato per una decina di euro un clone cinese dell'Arduino Duemilanove da usare come scheda da battagli su DealExtreme
Arduino Duemilanove originale
Clone Cinese
come si vede dal confronto con l'originale, il clone cinese mostra una serie di pin aggiuntivi per montare dei servo ma si tratta solo di pin connessi ai normali PWM dell'Arduino
Al momento di provarla ho caricato lo skecth di esempio Blink ma il programmatore si rifiutava sempre di completare il lavoro
Sul momento ho pensato che si fosse corrotto il bootloader dell'Arduino (i led della scheda si accendono quindi l'alimentazione e' presente) e stavo per sostituire il processsore con uno originale comprato direttamente programmato da Arduino
Cercando meglio sul sito di DealExtreme, tra i commenti, viene riportato che le prime schede prodotte presentavano una resistenza denominata R2 che deve essere rimossa per permettere la programmazione (nelle nuove schede sembra che questa resistenza sia stata rimossa)
Francamente non so dissaldare un componente con saldatura SMD ed ho provato prima ad interrompere la pista con un trincetto ma senza risultato. Ho preso quindi il coraggio ed ho provato a rimuovere direttamente il componente sollevandolo con un trincetto
Scheda con R2 rimosso
Fatto cio' la scheda e' risultata programmabile e perfettamente funzionante....questo e' il divertente di comprare in Cina
Il progetto di lettore per il Force Gauge per il laboratorio di geotecnica e' ai suoi passi finali
Nell'immagine sottostante il cavo rosso e giallo (in basso) derivano dai cavi di lettura del forge gauge (la cui alimentazione e' stata effettuata con una comune pila da 9V)
Il cavo blu che entra nel pin A0 dell' Arduino e' la lettura amplificata del segnale
I cavi nero e giallo accoppiato derivano corrente dall'Arduino ed alimentano il circuito e piu' in particolare l'LM358
Sono presenti inoltre una resistenza da 220 Ohm ed un trimmer (in blu) da 10 KOhm per tarare il valore di amplificazione
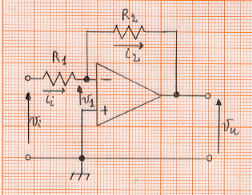
La configurazione dell'amplificatore e' quella di un operazionale invertente
per completezza riporto anche il pinout dell'LM358 (nel caso in esame e' stato usato solo un operazionale dei due che sono inseriti nell'IC)
e per finire un breve video che mostra la lettura della forza applicata sul force gauge direttamente nel monitor seriale dell'IDE di Arduino (e' stato usato lo sketch di esempio AnalogReadSerial nella categoria Basic)
Quando ero piccolo e guardavo Quark ero affascinato dalle riprese di persone che dormono (e soprattutto di quanto una persona si muova nel sonno) ..avrei voluto vedermi mentre dormivo
Naturalmente all'epoca non c'era ancora la diffusione dell'elettronica a basso costo di oggi ed avrei comunque dovuto dormire a finestra aperta. Oggi invece per pochi euro si possono comprare delle video camere ad infrarossi con illuminatori che permettono l'impiego in stanze di normali dimensioni completamente al buio. Il modello che ho comprato io era disponibile su Alibaba per meno di 20 euro (ovviamente e' privo di marca riconoscibile)
La video camera e' comoda perche' registra su una micro SD in formato GP3 ed ha solo dell'alimentazione da rete tramite il cavo USB ed il trasformatore allegato (fra parentesi il lettore microSD incluso nella confezione si e' rifiutato di lavorare sia su Windows che su Linux)
Alla fine si hanno file GP3 della lunghezza ciascuno di 30 minuti... il mio obbiettivo era quindi di avere un unico filmato accelerato (anche perche' vedere a tempo reale una registrazione di 7 ore di una persona che dorme e' francamente noioso). Cio' puo' essere fatto con FFMpeg
Per prima cosa si crea un file txt con all'interno la lista dei file che si vogliono unire secondo la seguente sintassi
----------------------- file '1.gp3' file '2.g3'
------------------------
chiamato questo file lista i vari video possono essere concatenati e convertiti in un unico passaggio con il comando ffmpeg -f concat -i lista.txt -c copy night.avi
a questo punto si puo' velocizzare l'esecuzione con il comando
Sto lavorando ad amplificare il segnale del Force Gauge gia' visto in questo post
Gli integrati di cui si trovano informazioni e tutorial (non molti peraltro) su Internet sono sostanzialmente due:
LM741 e LM358 (con il primo piu' datato e quindi con meggiore supporto dalla rete)
Ho provato entrambi e ci sono alcuni aspetti che fanno propendere per l'uso dell'LM358
LM358 ammette una alimentazione a due fili (Vcc e GND) e puo' essere alimentato anche da una comune pila a 9 V (puo' essere alimentato direttamente anche da Arduino). LM741 necessita invece di trasformatore a tre uscite (V+, GND e V-) e viene indicato di usare una tensione di 15 altrimenti non e' garantito che l'integrato funzioni (alcuni sembra di si' ,altri no)
LM358 ha un doppio operazionale mentre LM741 ne ha uno solo (con lo stesso numero di piedini)
LM741 ha in piu' il controllo dell'offset mediante gli appositi piedini OFFSET NULL
Pinout LM741
Pinout LM358
Il circuito di amplificazione e' gia' pronto e lo mostrero nei seguenti post (e' basato su LM 358)
Ho ritirato fuori per caso dall'archivio del materiale obsoleto questo terminale datato 2004 come anno di uscita che all'epoca era la formula 1 degli smartphone (tanto per dare un'idea l'Iphone sarebbe uscito nel 2007)
La caratteristica principale e' la tastiera QWERTY a scomparsa, la presenza di GPS, Bluetooth, WiFi con 128 Mb di Ram ed ha montato come sistema operativo supportato Windows Mobile 6.1 (incredibilmente lento)
Su questo terminale sono stati sviluppati molti progetti per effettuare il porting di altri sistemi operativi. Quello piu' interessante ed incredibile e' far girare Android 2.3.6 (uscito nel settembre 2011) su un terminale con specifiche di 7 anni prima. L'usabilita' non e' il massimo ma non e' peggio di Windows Mobile 6.1
Istruzioni per la configurazione di Android a questo link
Home di Android 2.3.6
Info su Android 2.3.6
Altrimenti e' possibile far girare sullo smartphone anche Linux con la versione Angstrom/QTopia.
In questo caso il progetto e' piuttosto vecchio e non e' piu' aggiornato dal 2007 (qui i file)












.jpg)









































{kind=link}